
Kinetix AI's KAI puts 115 degrees of freedom and tactile skin on a service humanoid priced under $40,000!
Shenzhen-based Kinetix AI has introduced KAI, a full-sized humanoid robot built for service environments including retail, concierge, and home assistance. The headline number is 115 degrees of freedom, with 72 of those in the hands alone, which is significantly higher than most humanoids currently on the market. Each hand splits that count between active joints for precise motor control and passive joints that act as mechanical buffers, allowing the hands to adapt to object shapes and absorb contact without needing computational input for every interaction. Layered on top of that is a synthetic tactile skin with 18,000 sensing points capable of detecting forces as light as 0.1 newtons, giving KAI continuous feedback to adjust grip and contact behavior in real time.
> The company is targeting a price below $40,000, with mass production planned for late 2026.
The intelligence behind KAI is built on what Kinetix AI calls a World Model, a three-layer decision-making system covering base reasoning, action selection and outcome evaluation. Before any movement executes, the system runs a predictive pass over likely environmental changes, a simulation-first approach that is gaining traction across physical AI development more broadly. Training data comes through KAI Halo, a wearable capture device that records first-person video, body motion, and spatial information as human operators carry out everyday tasks, feeding the robot naturalistic data rather than scripted demonstrations.
The tasks Kinetix AI has demonstrated range from sorting and dishwasher loading to clothes folding and needle threading, the last of which is a deliberate signal about how far the dexterity ceiling has been pushed. Whether that holds up in unstructured real-world conditions is the open question, but the hardware and the price point together make KAI one of the more complete service humanoid packages announced so far this year.
MIT and partners engineer a 3D-printable magnetic hydrogel that gives microscopic robots independently moving parts!
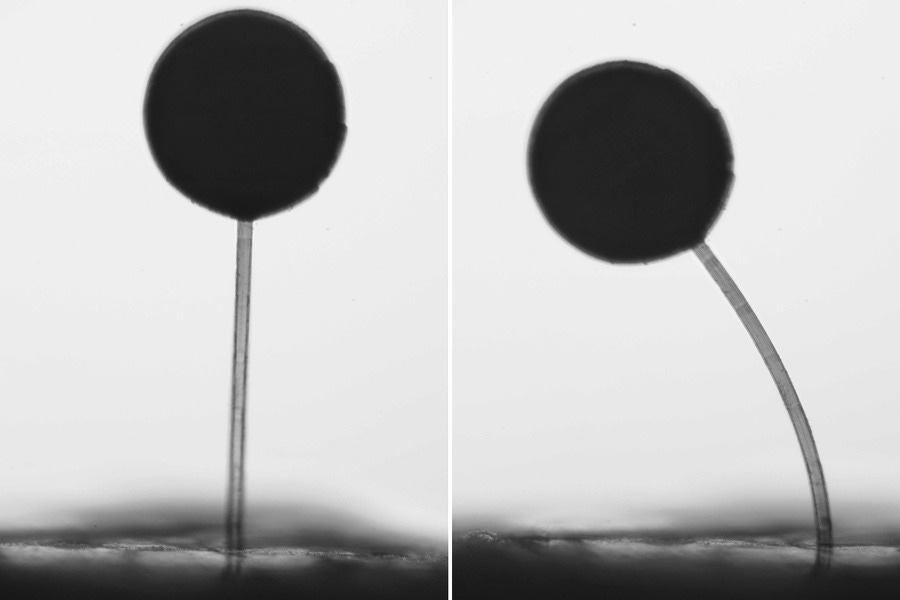
A research team from MIT, the Swiss Federal Institute of Technology Lausanne, and the University of Cincinnati has developed a soft magnetic hydrogel that can be 3D-printed into microscopic structures where individual components move and deform independently in response to an external magnetic field. That distinction matters because most existing magnetic materials at this scale move as a single rigid unit, which limits what they can do. The new gel allows different sections of the same microscopic robot to react with different strengths to a magnetic stimulus, enabling coordinated, finger-like motion from a structure smaller than a grain of sand. The researchers demonstrated this by printing lollipop-shaped structures and magnetizing individual components to varying levels, so that waving a standard refrigerator magnet near them caused the parts to move in coordination, effectively mimicking a robotic gripper. MIT study author Carlos Portela described the ability to produce intricate 3D architectures with independently moving components at this scale as a potentially game-changing capability for soft micro-robotics.
The harder engineering problem the team had to solve was the printing process itself. Standard two-photon lithography, the high-resolution laser printing technique used for sub-millimeter structures, breaks down when magnetic nanoparticles are introduced because the metal particles scatter the laser and clump together, compromising both resolution and structural integrity. The team worked around this with a sequential fabrication approach, printing the polymer structure first and then submerging it in successive chemical baths to grow iron-oxide nanoparticles directly within the gel after the fact. Crucially, laser power during the initial print controls gel density, which in turn determines how many magnetic ions each section absorbs, giving researchers precise control over the magnetic response of individual components within a single robot.
Beyond the gripper, the team also built a bistable switch using a millimeter-long gel rectangle fitted with magnetic oars the size of a red blood cell, which can be flipped between locked on and off positions using an external magnet, a mechanism that could function as a microscopic valve for regulating fluid flow in medical devices.
The intended application space covers targeted drug delivery and tissue sampling, where a robot small enough to navigate the body and latch onto a specific site would address problems that current tools cannot reach.

ABB's PoWa cobot family targets the payload and speed gap that has sat between collaborative and industrial robots!
ABB Robotics has introduced PoWa, a new family of collaborative robots carrying payload capacities between 7 and 30 kilograms and top speeds of up to 5.8 meters per second. The lineup is aimed at manufacturers running assembly, machine tending, palletizing, screwdriving, and welding operations that have outgrown what standard cobots can handle but do not want the infrastructure commitment that comes with conventional industrial robot cells. The gap PoWa is targeting is a familiar one in the automation market: cobots have historically been capped at lower speeds and lighter loads to keep them safe around people, while industrial robots are built for high-volume, fixed production lines that cannot easily be reconfigured. PoWa sits between those two categories by design.
The platform runs on ABB’s OmniCore controller and supports the company’s existing programming and simulation tools, with no-code setup intended to let operators deploy and redeploy units across different tasks without extensive retraining. That last point is particularly relevant for high-mix production environments, where the ability to switch a robot between jobs quickly carries as much practical value as raw speed or payload. Andrea Cassoni, ABB’s head of collaborative robots, framed the launch around two distinct customer types pulling in the same direction: smaller manufacturers taking their first steps into automation, and larger enterprises looking to extend robotics into processes that their existing systems were never built to handle. The PoWa release fits a pattern visible across the cobot market this year, where the boundary between collaborative and industrial robotics continues to compress, and the competitive pressure to offer more capability without more complexity is pushing every major player to extend their lineup upward.